Moottorin käytön aikana, reaaliaikainenseurantaaparametrit, kuten virta, nopeus ja pyörivän akselin suhteellinen asento kehän suunnassa, moottorin rungon ja käytettävän laitteiston tilan määrittämiseksi ja moottorin ja laitteiden käyntitilan edelleen ohjaamiseksi reaaliajassa, servon, nopeuden säätelyn jne. toteuttamiseksi. Monet erityistoiminnot.Tässä kooderia käyttäenEtuosan mittauselementtinä ei ainoastaan yksinkertaista mittausjärjestelmää huomattavasti, vaan on myös tarkka, luotettava ja tehokas.

Kooderi on pyörivä anturi, joka muuntaa pyörivien osien sijainnin ja siirtymän sarjaksi digitaalisia pulssisignaaleja.Ohjausjärjestelmä kerää ja käsittelee nämä pulssisignaalit, ja annetaan joukko ohjeita laitteiston käyttötilan säätämiseksi ja muuttamiseksi.Jos anturi yhdistetään hammastankoon tai ruuviruuviin, voidaan sillä mitata myös lineaaristen liikkuvien osien sijaintia ja siirtymää.
Antureita käytetään moottorin lähtösignaalien takaisinkytkentäjärjestelmissä, mittaus- ja ohjauslaitteissa.Enkooderi koostuu kahdesta osasta: optisesta koodilevystä ja vastaanottimesta.Optisen koodilevyn pyörittämisen synnyttämät optiset muuttuvat parametrit muunnetaan vastaaviksi sähköisiksi parametreiksi ja teholaitteita ohjaavat signaalit lähetetään vaihtosuuntaajan esivahvistimen ja signaalinkäsittelyjärjestelmän kautta..
Yleensä pyörivä anturi voi syöttää takaisin vain nopeussignaalin, jota verrataan asetettuun arvoon ja syötetään takaisin invertterin suoritusyksikköön moottorin nopeuden säätämistä varten.
Tunnistusperiaatteen mukaan kooderi voidaan jakaa optiseen, magneettiseen, induktiiviseen ja kapasitiiviseen.Skaalausmenetelmänsä ja signaalin lähtömuotonsa mukaan se voidaan jakaa kolmeen tyyppiin: inkrementaalinen, absoluuttinen ja hybridi.
Inkrementtianturi, sen sijainti määräytyy nollapisteestä laskettujen pulssien lukumäärän perusteella;se muuntaa siirtymän jaksoittaiseksi sähkösignaaliksi ja muuntaa sitten sähköisen signaalin laskentapulssiksi, ja pulssien lukumäärä edustaa siirtymää;absoluuttinen Tyyppikooderin sijainti määräytyy lähtökoodin lukemisen perusteella.Kunkin ympyrän sisällä olevan sijainnin lähtökoodiluku on yksilöllinen, ja yksi-yhteen vastaavuus todellisen sijainnin kanssa ei katoa, kun virta katkaistaan.Siksi, kun inkrementtianturi sammutetaan ja käynnistetään uudelleen, asemalukema on nykyinen;jokainen absoluuttisen kooderin paikka vastaa tiettyä digitaalista koodia, joten sen ilmoitettu arvo liittyy vain mittauksen aloitus- ja loppukohtaan, kun taas sillä ei ole mitään tekemistä mittauksen väliprosessin kanssa.

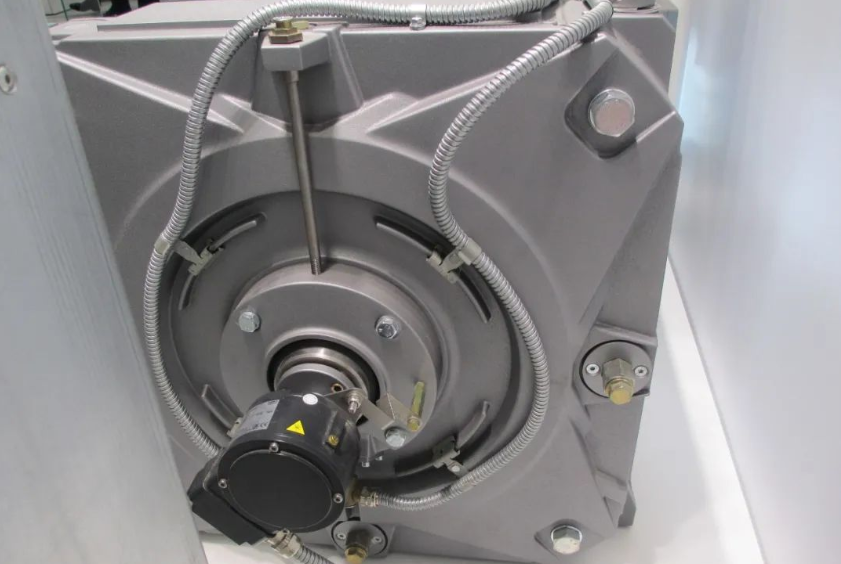
Kooderi moottorin käyntitilan tiedonkeruuelementtinä on kytketty moottoriin mekaanisella asennuksella.Useimmissa tapauksissa moottoriin on lisättävä anturin kanta ja liitinakseli.Moottorin toiminnan ja vastaanottojärjestelmän toiminnan tehokkuuden ja turvallisuuden varmistamiseksi kooderin päädyn liitäntäakselin ja pääakselin koaksiaalisuusvaatimus on valmistusprosessin avain.
Postitusaika: 20.7.2022